home | portfolio | publications
Augmented Reality Assisted Multimodal Control for Robotic Arm (2009 – 2010)
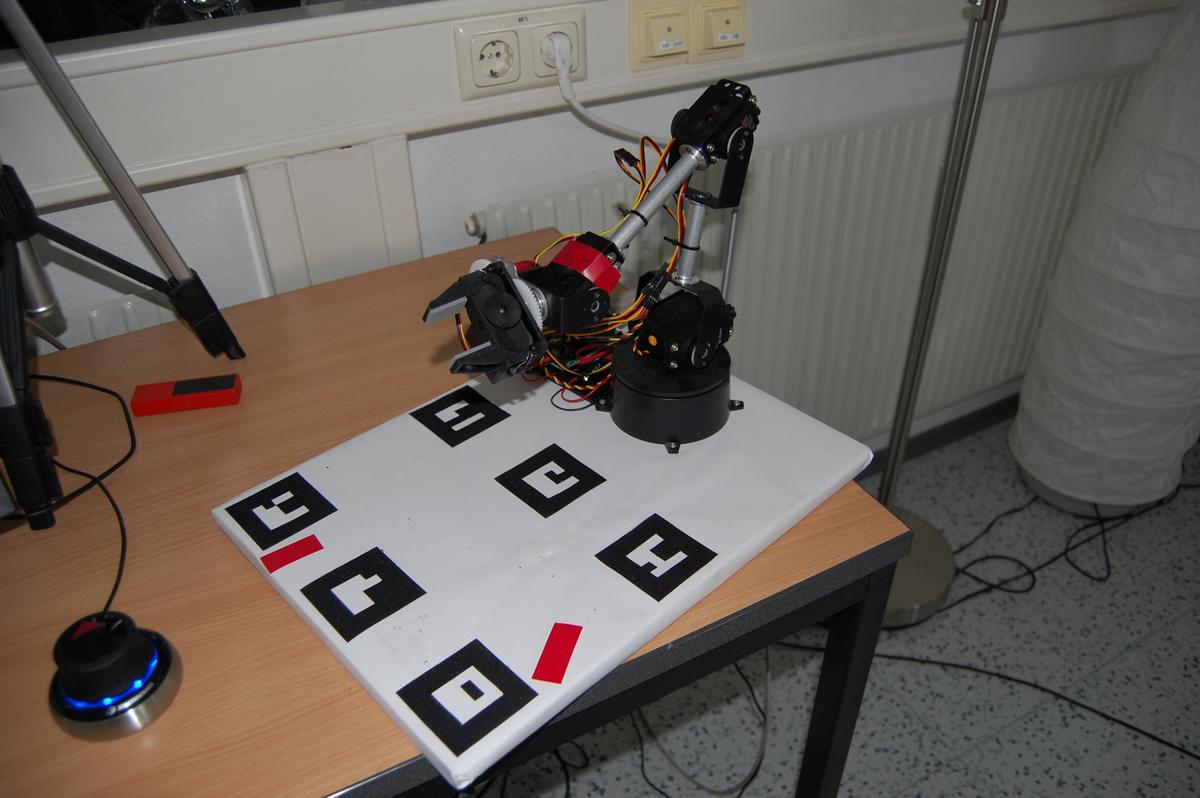
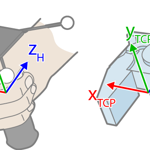
 credit: Roland Aigner, University of Applied Sciences Upper Austria
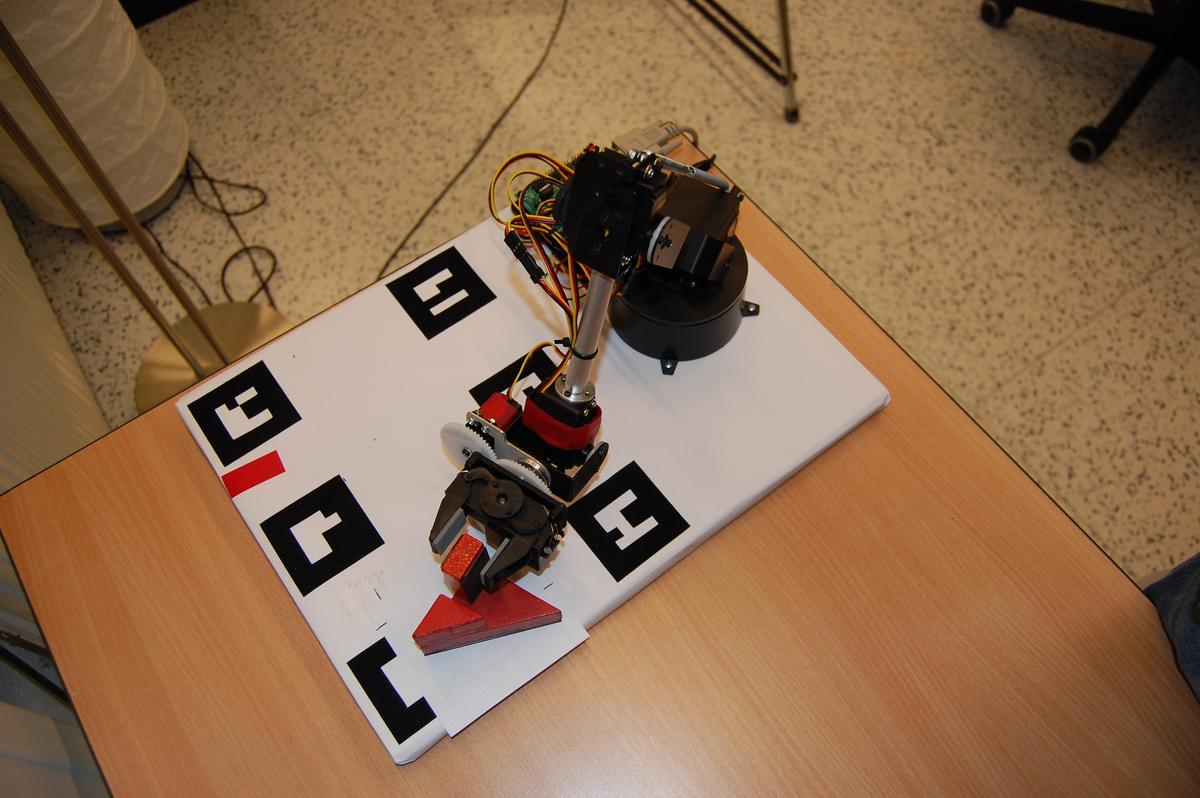
credit: Roland Aigner, University of Applied Sciences Upper Austria
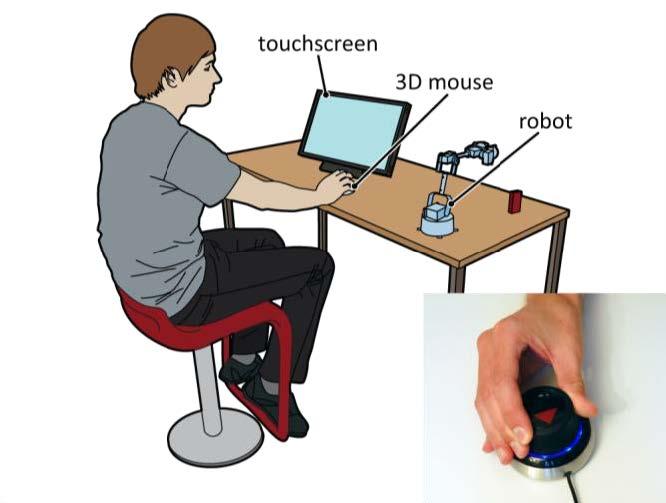
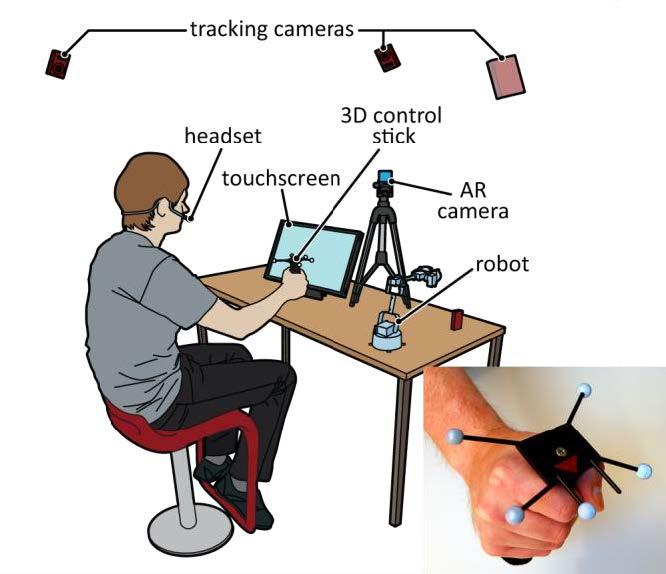
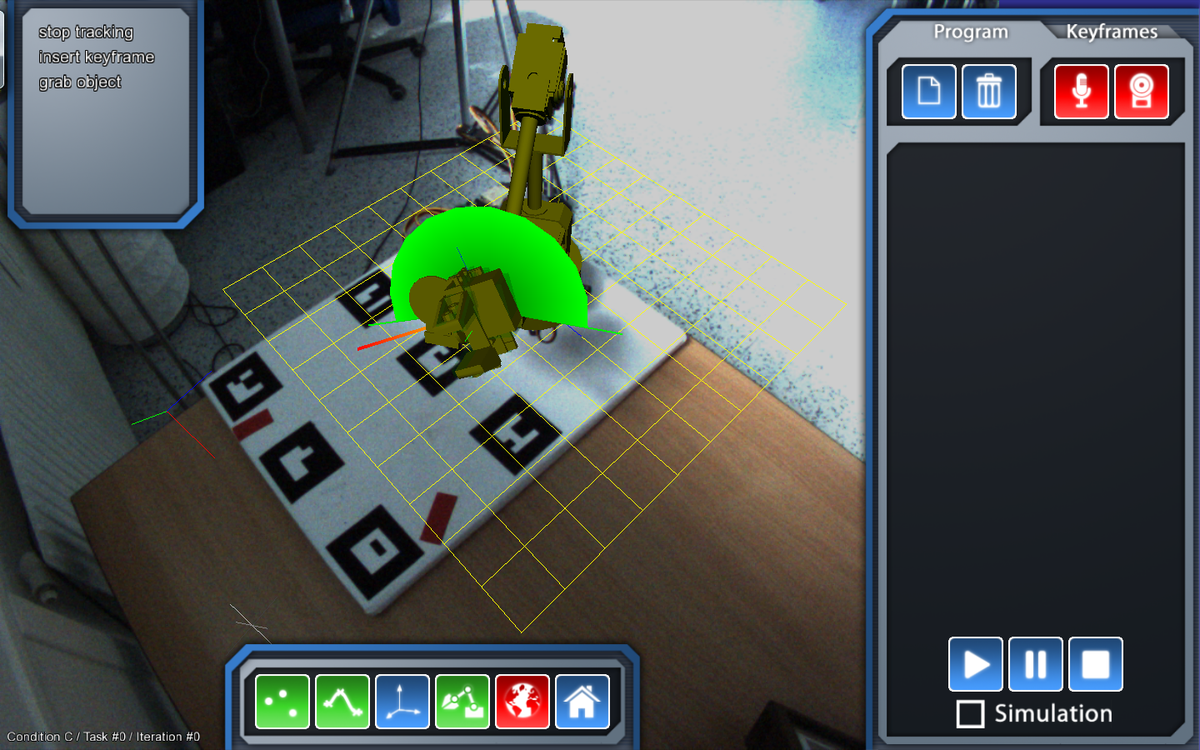
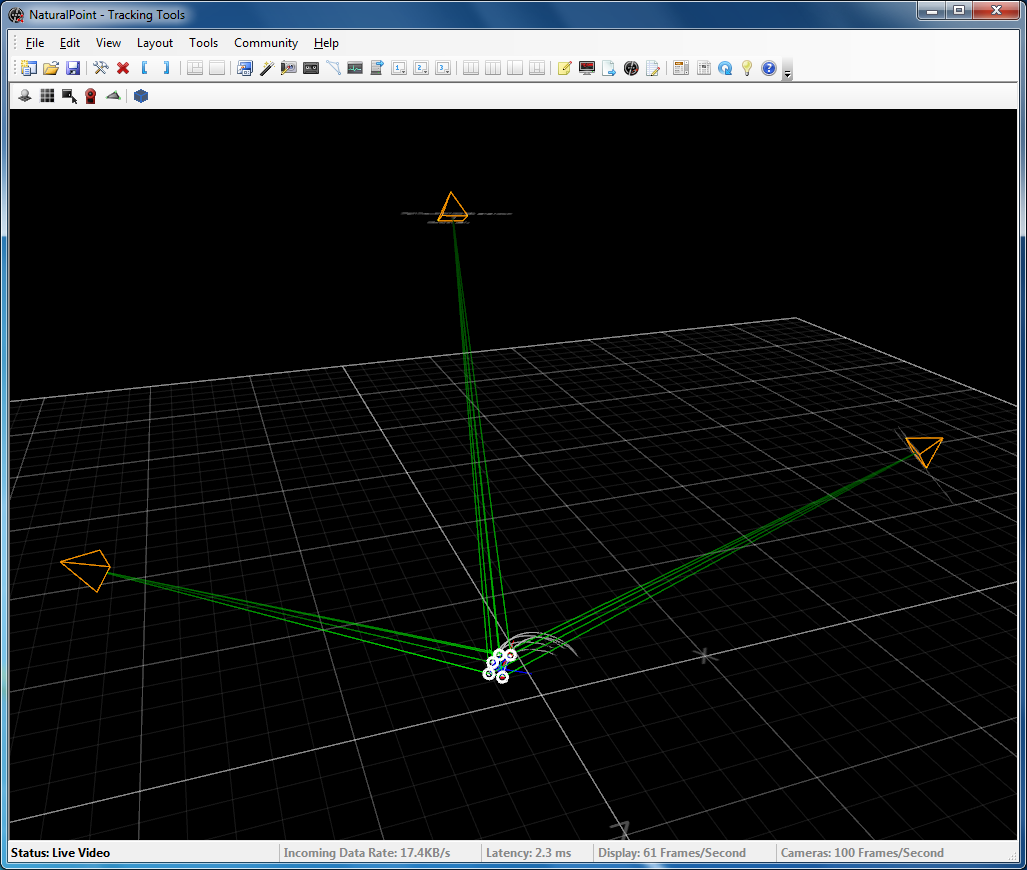
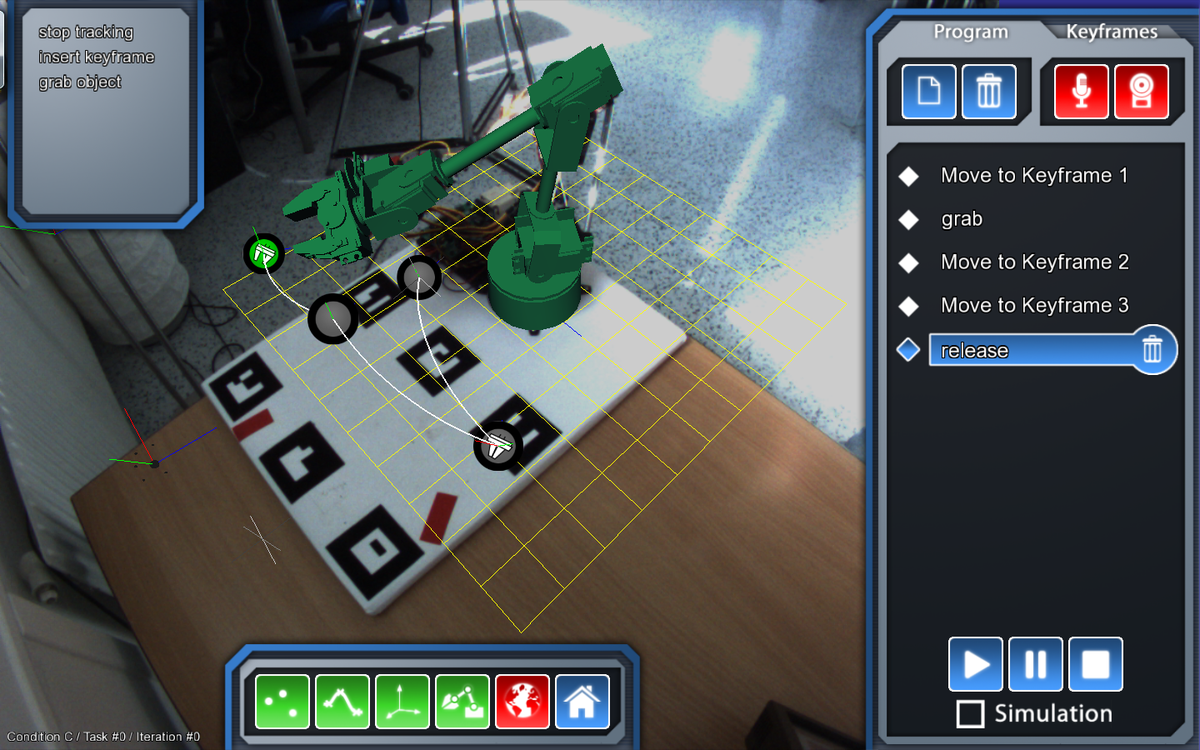
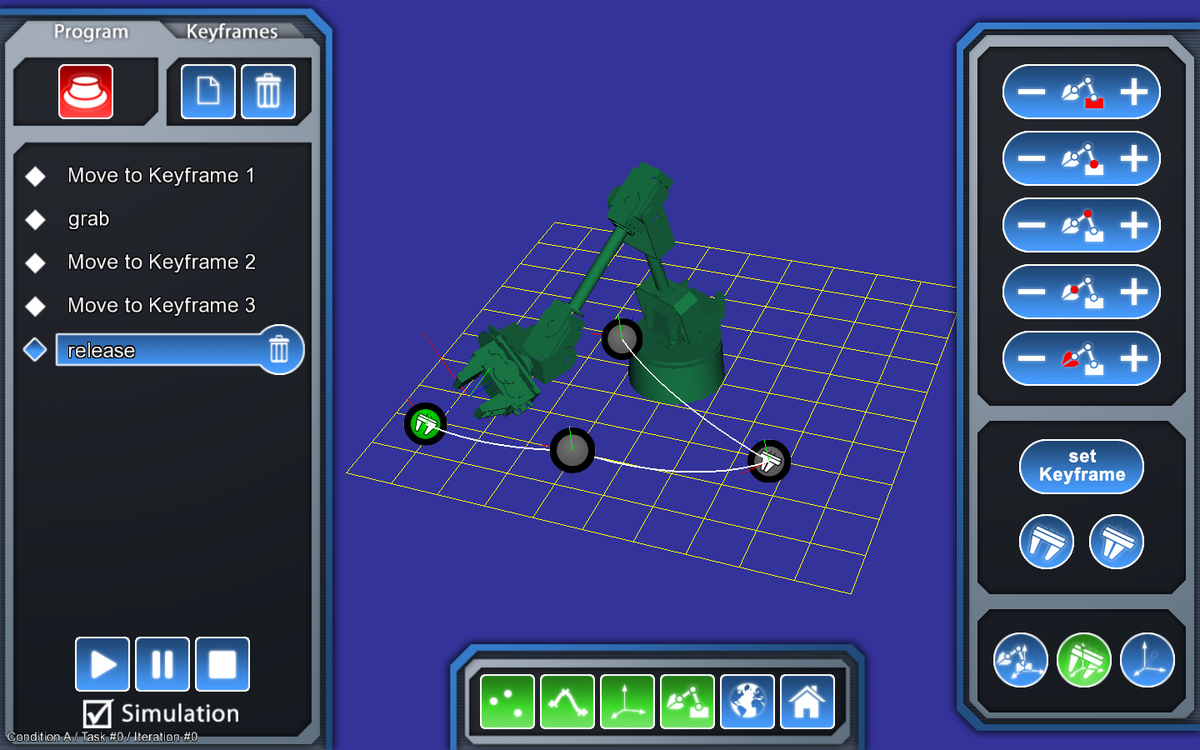
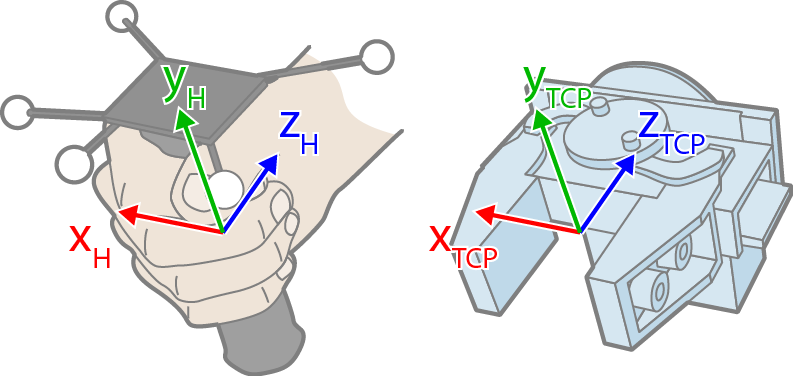
Addressing the complexity of status-quo Teach Pendant interfaces, as they are commonly used for programming industrial robots, this thesis explores a novel interface for command-and-control of robotic arms, in particular for use cases where speed outweighs precision requirements. A miniature 5-DOF robotic arm was used as a substitute for performing a user study for a multi-modal robotic interface, which combed multitouch input with command-based speech interface and 6-DOF hand pose tracking, enabled by optical marker-based rigid body tracking. The latter was used to create an instantaneous 1-to-1 translation of the operator’s arm movement to those of the robot, establishing immediate and intuitive control. A see-through Augmented Reality visualization on a multitouch screen was supporting with spatially co-located process information. For validation, a user study was conducted to gain both quantitative and qualitative data, which is presented in the thesis.
Context: MSc thesis
Contribution: overall concept and interaction design, implementation of multimodal command-and-control interface, including multitouch, speech recognition, implementation of augmented reality visualization, calibration, adaptive camera control, user study design and execution, data evaluation
Credits: University of Applied Sciences Upper Austria, PROMOT Automation GmbH
Gallery:









Downloads:
The Development and Evaluation of an Augmented Reality Assisted Multimodal Interaction System for a Robotic Arm (MSc Thesis)
© copyright 2026 | rolandaigner.com | all rights reserved